Continuum Robotics:
Innovation Inspired by Nature
This 3D animation introduces viewers to continuum robots, a groundbreaking class of machines defined by their extraordinary flexibility and range of motion.
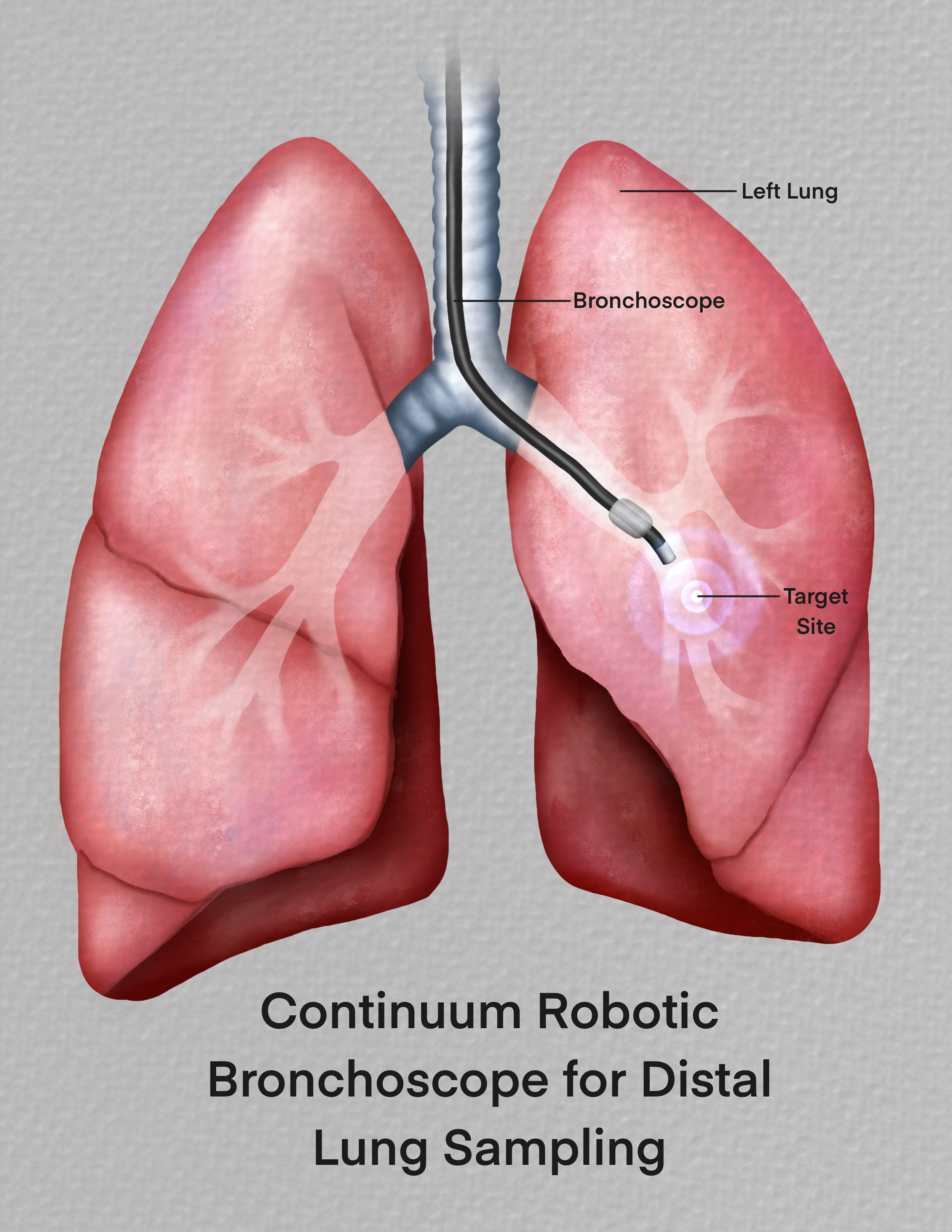
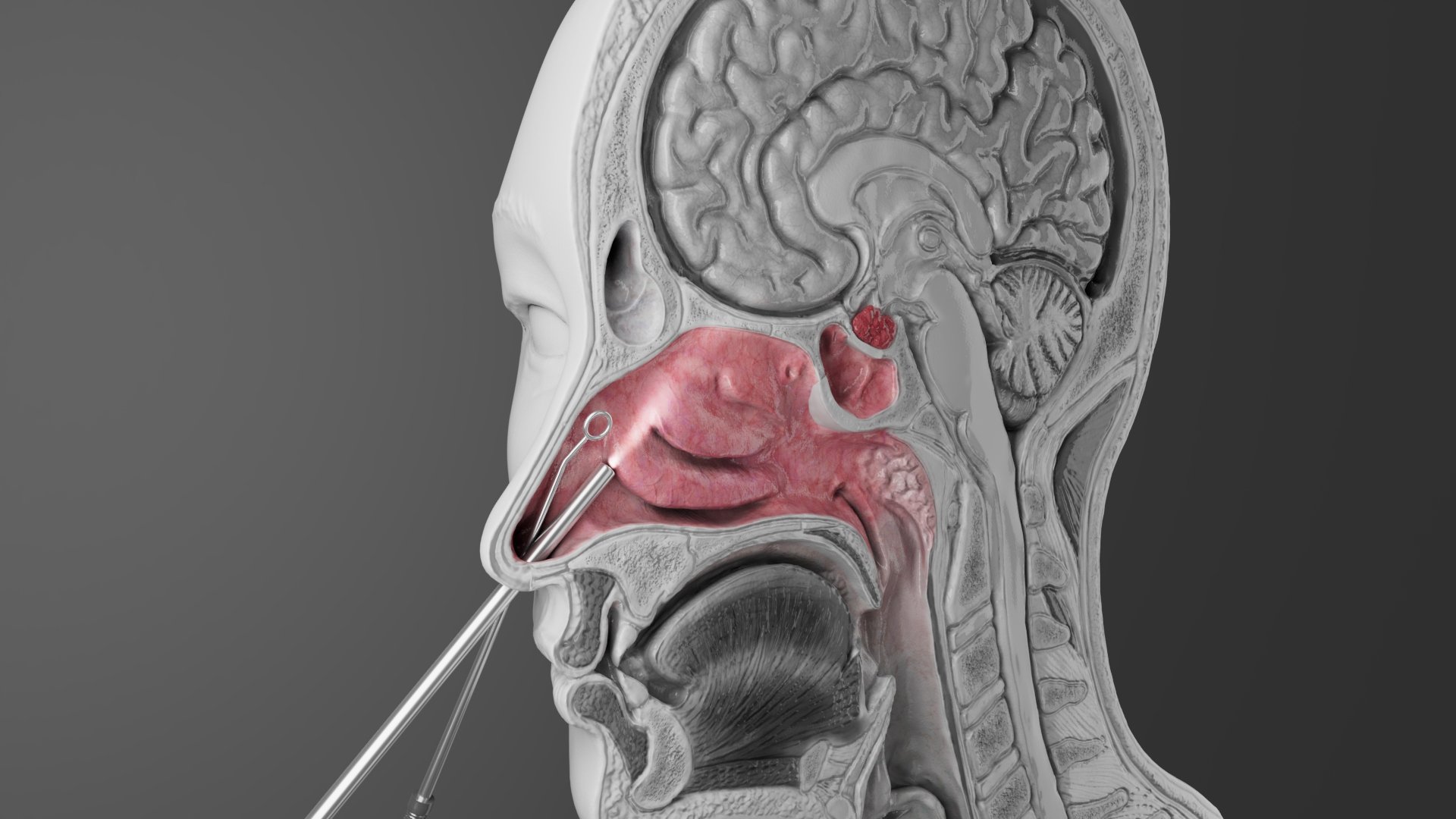
Unlike traditional rigid robots, continuum robots are designed to bend, twist, and adapt with remarkable precision, making them indispensable for delicate procedures such as microsurgery, as well as for high‑stakes applications in search and rescue, industrial inspection, and even space exploration.
This project was created as my Master’s capstone project in collaboration with Dr. Jessica Burgner‑Kahrs, Director of the Continuum Robotics Laboratory at the University of Toronto, and supervised by Professor Michael Corrin and Professor Marc Dryer. The animation was designed to immerse a lay audience in both the science and the story of these robots. With accessible narration and fluid, continuous visuals, it conveys the elegance of their movements while highlighting their transformative potential in medicine and industry.
The production combined artistic storytelling with technical accuracy: models were sculpted in Nomad Sculpt and Autodesk Maya, textured in Adobe Substance Painter, and animated in Maya to reflect the robots’ distinctive motions. Final compositing and visual effects were completed in Adobe After Effects and Premiere Pro, resulting in an educational experience that is both visually striking and scientifically rigorous.
Roles: Research, Script Writing, Storyboarding, 3D Modelling, 3D Animating, Rendering, Compositing
Audience: Educated lay audience (ex. undergraduate and graduate students in a engineering/medical program, industry representatives in R&D roles)
Clients: Dr. Jessica Burgner-Kahrs (Director of Continuum Robotics Research Laboratory), Professor Michael Corrin (Director of Biomedical Communications Program at University of Toronto), Professor Marc Dryer, Associate Professor of Biomedical Communications Program)
Communication Objective: Develop a compelling and memorable short animation that generates an interest to learn more about continuum robotics and the UTM Continuum Robotics Laboratory.
Medium: Web, 3D Animation
Presentation: Conference presentations, website, on TVs in lab space during tours
Software: Autodesk Maya, Nomad Sculpt, ZBrush, Adobe After Effects, Adobe Audition, Adobe Premiere Pro, Adobe Photoshop, Adobe Illustrator, Figma, Procreate
Research
As part of this project, I conducted a thorough review of the literature and existing media on continuum robots to identify gaps in scientific communication. I examined best practices in educational animation, drawing on research to inform my use of metaphors, visual cues such as labels and highlights, and narrative structure—ensuring the final piece would support audience learning while minimizing distraction.
Surprisingly, I found no prior animations that offered a comprehensive explanation of what continuum robots are, how they move, and the range of applications they enable. Existing media largely consisted of isolated lab demonstrations or promotional videos, which either showcased a specific prototype in motion or discussed the technology in broad terms without clarifying its underlying principles.
Research Proposal

Media Audit

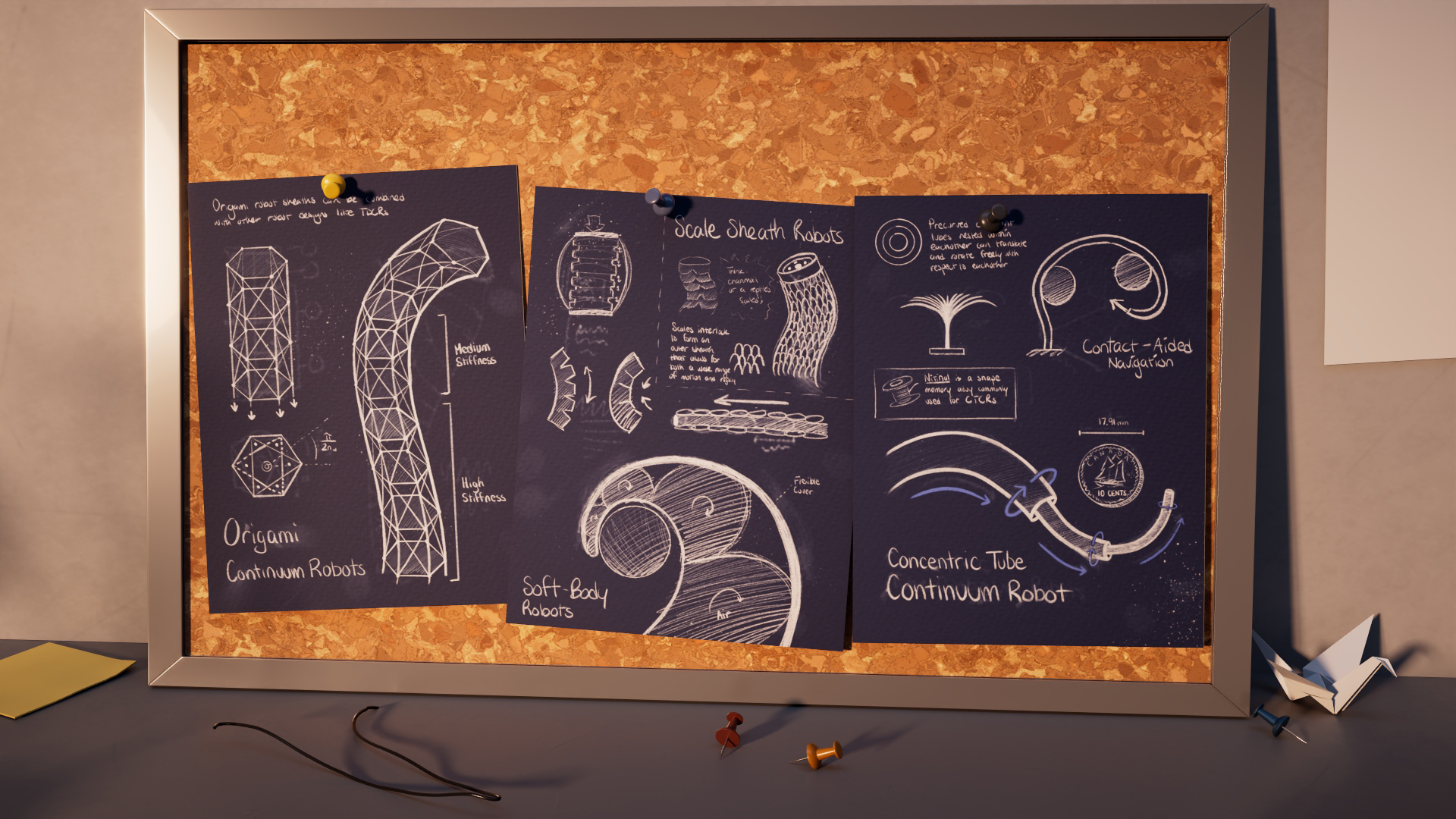
Concept Art and Moodboards
One of the most rewarding aspects of creating this animation was developing its visual style. I approached this by carefully considering how color and lighting could shape tone and guide audience perception, then working backward to identify the styles best suited to those goals. For this project, I aimed for an aesthetic that was professional, clean, and elegant, while deliberately avoiding the overly cold or sterile look common in much of the media surrounding medical devices and robotics. I also made deliberate use of depth of field and environmental design to direct the viewer’s eye, helping to emphasize key elements and facilitate learning by reducing distractions.


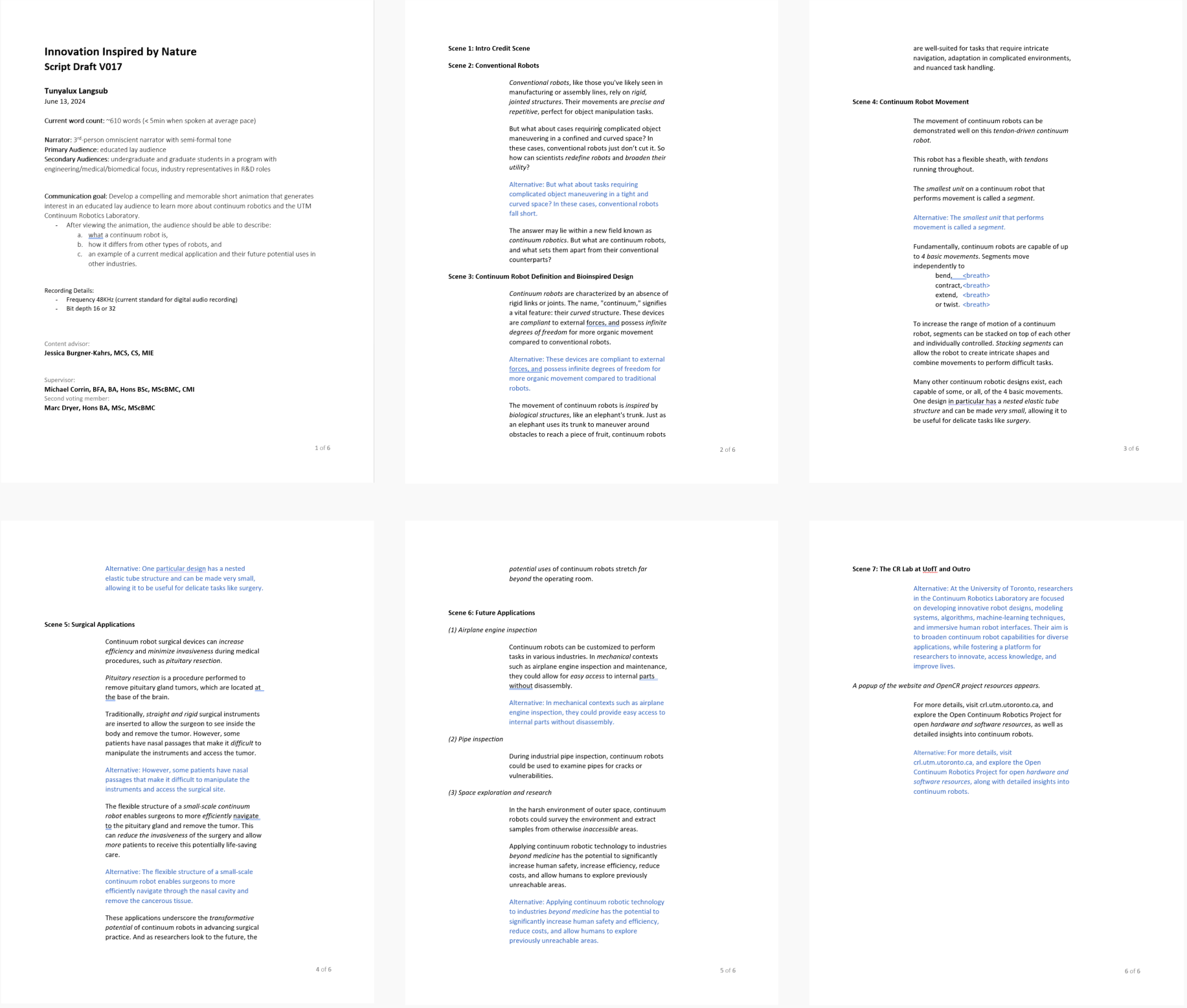
Script Writing
The script was developed using insights drawn from the research proposal and media audit, and refined through numerous rounds of feedback from Dr. Jessica Burgner‑Kahrs and Professor Michael Corrin. Together, we determined that a professional yet approachable tone would be most effective for the intended audience. The final script struck a balance between delivering key educational content and maintaining a clear overarching narrative. Voice actress Heather Bambrick brought this vision to life, delivering the narration with clarity and warmth that perfectly matched the desired tone.
Script
Storyboarding
This stage marked the true beginning of the animation’s visual narrative. The process of assembling the key story beats resembled fitting together pieces of a puzzle to reveal the larger picture. Using Figma, storyboard panels were organized and rearranged until the flow of scenes became clear, allowing each shot to be placed purposefully within the structure of the animation. Careful attention was given to camera angles, composition, movement, and transitions, ensuring that the visual storytelling reinforced both clarity and engagement. In total, three storyboard versions were developed, with numerous refinements leading to the final iteration.

Storyboard 1

Storyboard 2

Storyboard 3
Animatics
By arranging the storyboard images in sequence, I was able to clearly communicate to both the client and my committee how transitions, cuts, and visual or audio cues contributed to the overall flow of the animation. The animatic stage proved especially valuable for refining timing and pacing, with many adjustments made along the way—evident in the significant differences between the two versions produced.
My first animatic
An end-stage animatic
Project Stills










Working through a Problem
As this was my first major animation, I encountered several challenges that required creative problem solving. A key hurdle was finding a way to accurately depict the unique motion of a tendon‑driven continuum robot—bending, extending, compressing, and twisting—without relying on physics‑based simulations.
After consulting with Professor Marc Dryer, the resident Maya expert at BMC, I learned that achieving all four motion primitives would likely require combining different rigging approaches. To explore solutions, I set up a separate test scene with simplified meshes, which allowed me to experiment with rig behavior and limitations.
I quickly realized that a wire deformer, while effective for bending, could not convincingly show extension or contraction, especially given the patterned mesh I used to highlight deformations. Moreover, the rig broke down at sharper spline angles. To address this, I built a skeleton with numerous bones and joints inside the robot mesh, applying an IK spline to take advantage of Maya’s built‑in transformation tools. While this solution worked well for bending and twisting, it fell short for accurate contraction. To resolve this, I created a custom blendshape that simulated the distinctive “bunching” of the robot’s sleeve during compression, ultimately achieving a more precise and believable portrayal of its movement.

Here is how the rig turned out!